
A conferma della forte caratterizzazione pratica della didattica del Master, anche quest’anno è stata portata in essere un’uscita con rilievo fotogrammetrico tramite SAPR, nell’ambito del corso “Sistemi a Pilotaggio Remoto per il territorio e la gestione delle risorse”. Quella che si sta consolidando come una tradizione molto apprezzata dai corsisti, dopo il successo del rilievo del paesaggio terrazzato di Riofreddo (VI), questa volta ci ha visti ospiti della tenuta vitivinicola Amadio, presso Monfumo (TV), proprio nel cuore della zona del Prosecco DOCG, a un passo dal bellissimo borgo di Asolo.

Aspetti tecnici del rilievo con droni I corsisti sono stati suddivisi in gruppi che a rotazione accompagnavano le attività di campo: pianificazione del volo, posizionamento dei ground control points e rilievo GPS, rilievo con drone e infine il post processing per ottenere la nuvola di punti e l’ortofoto dall’area monitorata, grazie all’uso del software Pix4D. E naturalmente, assieme alle attività prettamente didattiche, non poteva mancare un’altra tradizione del Master, ovvero un bel pranzo conviviale a base di soppressa e formaggio, il tutto innaffiato da dell’ottimo prosecco della tenuta Amadio!  La preparazione della missione ed il coordinamento delle attività didattiche è stato condotto dall’equipe del Master in GISscience e Droni: Prof. Massimo De Marchi (direttore del Master), Dr. Eugenio Pappalardo, Dr. Daniele Codato, Dr. Federico Gianoli. Importante è stato anche il supporto del dott. Stefano Brugnaro, geologo ed ex corsista del Master. Il rilievo con Sistemi Aerei a Pilotaggio Remoto (SAPR) è stato realizzato da Thomas Fontana ed Enrico Signor, di FTO Remotefly di Padova, partner operativo del Master.
La preparazione della missione ed il coordinamento delle attività didattiche è stato condotto dall’equipe del Master in GISscience e Droni: Prof. Massimo De Marchi (direttore del Master), Dr. Eugenio Pappalardo, Dr. Daniele Codato, Dr. Federico Gianoli. Importante è stato anche il supporto del dott. Stefano Brugnaro, geologo ed ex corsista del Master. Il rilievo con Sistemi Aerei a Pilotaggio Remoto (SAPR) è stato realizzato da Thomas Fontana ed Enrico Signor, di FTO Remotefly di Padova, partner operativo del Master. 
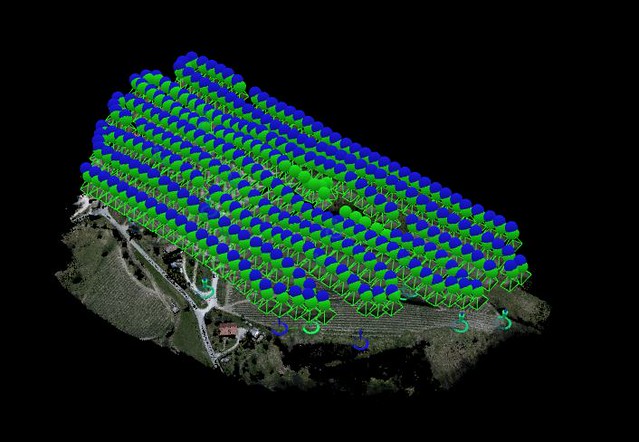
Il SAPR utilizzato è il Multirotor G4 Surveying Robot, su cui è stata posizionata una fotocamera Olympus E-PL5 con obiettivo Panasonic 14 mm f/2.5. Il mezzo ha sorvolato i 5 ettari della Tenuta a 70 metri d’altezza dal suolo e ad una velocità di 5 m/s per un totale di circa 25 minuti di volo suddivisi in 2 voli. Sono state restituite oltre 282 fotografie con risoluzione a terra di 2 cm/pixel. Il rilievo è stato pianificato in 3D grazie ad un software sviluppato dall’ing. Thomas Fontana di Al-to drones, e ha visto il posizionamento di 15 punti di controllo a terra, presi con GPS differenziale Leica. Ogni fase del volo è stata monitorata dal pilota su uno schermo da 7’’ applicato al radiocomando che riceveva il segnale dalla fotocamera su una frequenza di 5.8 GHz, controllando così la qualità del dato rilevato e da un secondo pilota che seguiva e controllava il piano di volo da un secondo terminale. L’esacottero Multirotor G4 Surveing Robot è stato concepito per il rilevamento topografico. La combinazione del flight-control, i sei motori elettrici ad elevata efficienza e il brushless gimbal fanno di questo prodotto l´attrezzo ideale per rilevamenti topografici. Il Payload (compreso gimbal e batteria) è di 2300 g con un peso massimo al decollo di 5000 g. Il rilievo dei Ground Control Points (GCP) è stato coordinato dal dr. Sandro Rossato dell’università di Padova attraverso un GPS differenziale (D-GPS), modello Leica Viva GS15, che consente l’acquisizione di punti spaziali con un’incertezza inferiore ai 4 cm, in condizioni ottimali. In fase di post-processing, le coordinate geografiche dei punti acquisiti (Datum: WGS84) sono state controllate, per verificarne posizionamento ed eventuali errori, e convertite in coordinate piane in UTM 32, per favorirne l’elaborazione. Successivamente le foto scattate dal drone e i ground control points sono stati processati con il software Pix4D per ottenere la nuvola di punti e l’ortofoto dell’area di studio.
Il Master in GIScience
Si tratta del primo Master di secondo livello in Italia su GIScience e droni.
Attualmente è in corso la seconda edizione del Master, iniziata a febbraio 2017 e che vede la partecipazione di 31 corsisti di diverse provenienze territoriali, professionali e di formazione accademica, mentre la prima edizione ha visto la presenza di 25 studenti che hanno conseguito il loro titolo nel dicembre 2016. L’apertura delle iscrizioni per la terza edizione del Master avverrà a luglio, con inizio dei corsi in ottobre 2017.
E’ coordinato dal Dipartimento di Ingegneria Civile Edile ed Ambientale dell’Università di Padova e vede la collaborazione di quattro Dipartimenti del nostro Ateneo: Scienze Storiche, Geografiche e dell’Antichità (DiSSGeA), Geoscienze, Agronomia Animali Alimenti Risorse Naturali e Ambiente (DAFNAE), Territorio e Sistemi Agro-Forestali – TESAF.
Il master propone una attiva collaborazione tra il mondo dell’Università e delle imprese de settore GISscience e droni, con numerose partnership attivate ed in corso di attivazione. Si segnala in particolare quella con FTO Remote Fly di Padova, Alto-drones di Bolzano e Archetipo srl di Padova, che ha permesso di utilizzare strumentazione d’avanguardia per i rilievi ambientali portati in essere.
Il Master si caratterizza per la proposta di consolidamento professionale basato sugli approcci interdisciplinari della GIScience e sull’uso consapevole delle tecnologie dell’informazione geografica (droni e non solo) fornendo strumenti concettuali e operativi per l’analisi e la gestione sostenibile del territorio e delle risorse naturali, anche attraverso l’offerta di quattro indirizzi:
• Produzione e gestione della geo-informazione
• GIScience per la gestione dei conflitti ambientali e la partecipazione nelle decisioni pubbliche
• Cartografia e GIS per le green infrastructures
• Geo-informazione e nuove tecnologie per l’agricoltura sostenibile.
Riferimenti
Prof. Massimo De Marchi, PhD
Direttore del Master “GIScience e sistemi a pilotaggio remoto per la gestione integrata del territorio e delle risorse naturali”
Dip. di Ingegneria Civile, Edile e Ambientale – Università di Padova
email: massimo.demarchi[at]dicea.unipd.it